

特徴
自動運転システムの全体像の理解と実践的な学習
理論と実例を用いて学べる講義と自動運転レーシングカー開発体験を通して、自動車制御技術やAIの活用方法を実践的に学べます。自動車およびモビリティ関連の専門業務や学習の際に、自動運転システムの全体像を理解することは非常に重要です。
学びやすいサポート環境
シミュレーターは初学者に優しいUXで、環境構築やセットアップ不要で利用できます (利用予約制)。オンライン学習動画の提供だけでなく、学習者コミュニティでの質疑対応など、開発体験できるまで運営がサポートします。
タイムアタックに挑戦
自動運転レーシングカーでタイムアタックに参戦することで、学習したスキルを楽しく試せます。 開発サイクル (アルゴリズム開発→シミュレーション検証→データ解析) を回して、最速のレーシングカーを開発しましょう!
学習コンテンツの
主に未経験者から大学基礎レベルの内容に焦点をあてており、初めてモビリティやAIについて学びたい方に最適です。

対象者
未経験~大学レベル
- 自動運転システムや自動車制御について初めて勉強したい方
- 詳細なコード解説より、まずは開発体験を通して全体像を理解したい方
できること
- シミュレーターを使って、自動運転ソフトウェアのコア部分を開発体験する
- 開発項目ごとにラップタイムを計測することで、開発成果を実感できる
- 自動車およびモビリティ制御技術の基本原理から最新事例を学ぶ
VML自動運転

講義サンプル
無料アカウントを作成していただくと、自動運転システムの概要講義の一部が視聴できます。
自動運転システムの概要
自動運転システムの概要について学びます。大規模言語モデルの自動運転への応用事例も紹介します。
走行経路設計と車両制御の基礎
Pythonを使って自動運転レーシングカーの走行経路を設計します。また、アクセルやステアリング制御も行います。
モデル予測制御
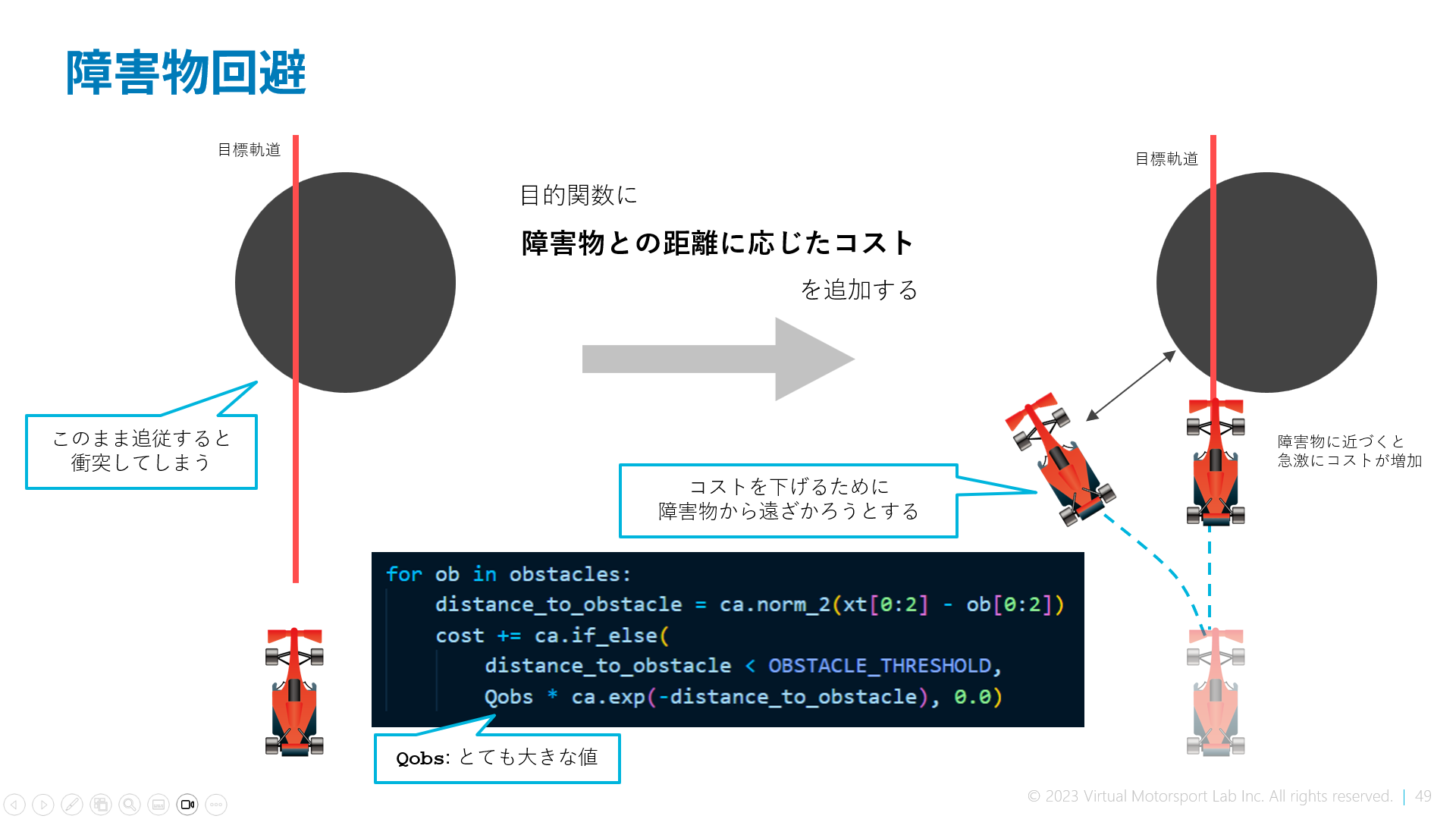
自車の走行経路を予測して、障害物がある場合は自動的に回避する「モデル予測制御」のアルゴリズム開発を学びます。
深層強化学習
深層強化学習を用いて、車載カメラの画像から自律走行する車両モデルを開発します。
学習できる項目
プログラミング (Python)
- 変数、リスト、関数の使い方
- アルゴリズムの理解 (ループ処理、条件分岐)
- グラフやデータの可視化
- エラー対応
AI・機械学習
- 機械学習の概要 (教師あり / 教師なし / 強化学習)
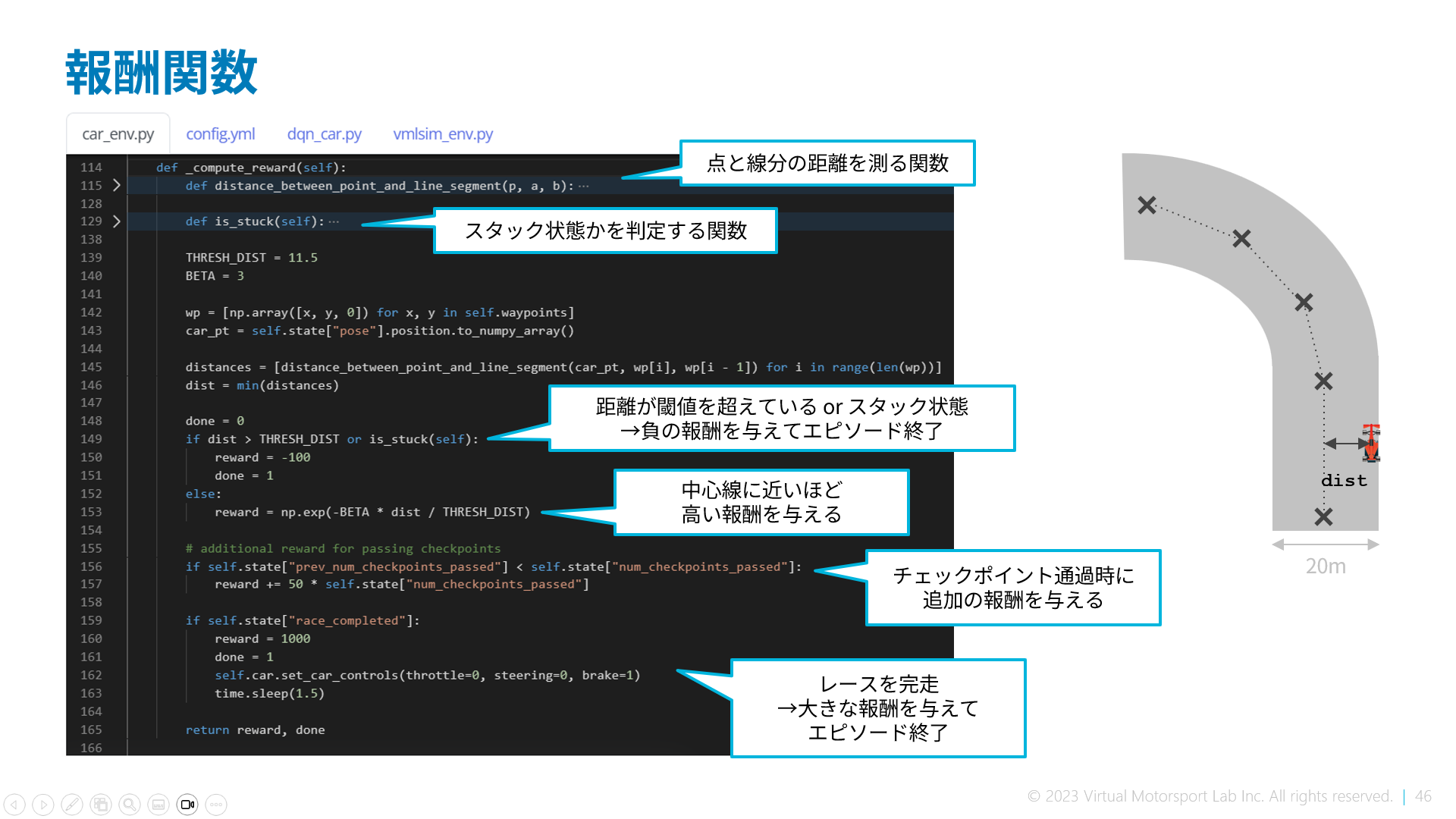
- 報酬関数の理解と調整
- 深層強化学習
- モデルの学習と評価
モビリティへの応用
- 自動運転システムの概要
- モビリティや実機制御の基礎 (PID / LQR / モデル予測制御)
- 最新技術の自動運転への応用 (大規模言語モデル / マルチモーダルモデル)
初心者にもやさしい
- 実践的な開発コンテンツ 自動運転車両やレーシングカーの開発経験がある、自動車メーカー出身のエンジニアが設計
- UX設計 自動運転レーシングカー開発を通して、未経験者でもソフトウェア開発やデータ解析経験が積めることを重視
- 準備ゼロ インターネットに繋がるPCがあればすぐに使えて、初学者がつまづきやすい環境構築やソフトウェアのインストールが不要
料金
学習目標 自動運転システムの概要を理解する
(講義のみ)
- 期間:--
- シミュレーターチケット: --
- 動画講義時間:約1時間 ※2
- 学習項目
- 自動運転システムの概要
学習目標 車両制御の加減速・ステアリング制御と走行経路設計をPythonを使って開発する
- 期間:1カ月間 (買い切り)
- シミュレーターチケット: 10時間分 ※1
- 動画講義時間:約2.5時間 ※2 ※3
- 学習項目
- 無料プランの内容
- 加速・減速制御
- ステアリング制御
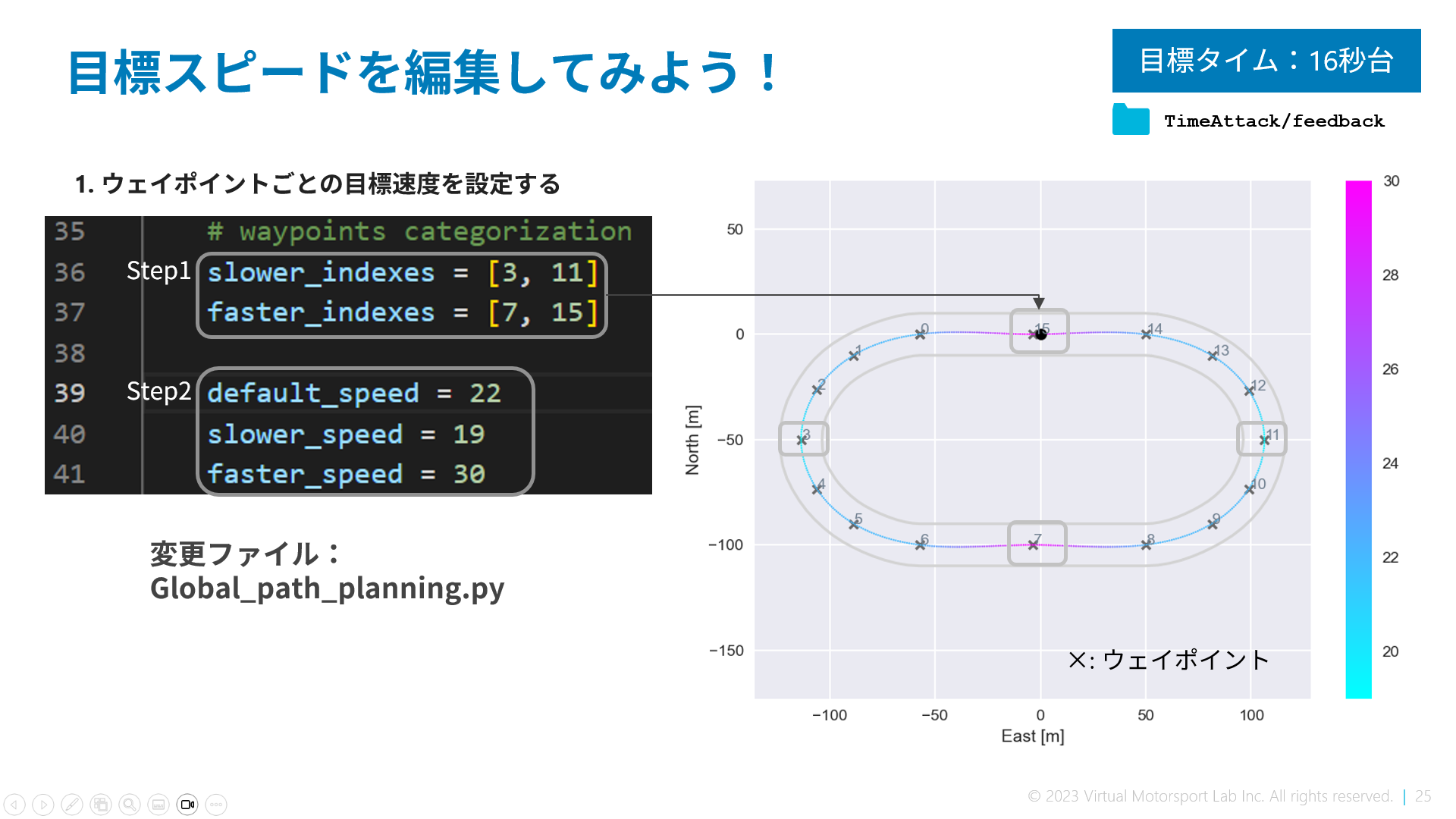
- 走行経路設計
学習目標 強化学習を使って自律走行モデルを開発する / 障害物回避のアルゴリズムを理解する
- 期間:3カ月 (買い切り)
- シミュレーターチケット: 30時間 ※1
- 動画講義時間:約5時間 ※2 ※3
- 学習項目
- ライトプランの内容
- 障害物回避 (モデル予測制御)
- 深層強化学習
- LLM/LMMの自動運転への応用※4
※1 シミュレーターは10-24時の時間枠で予約可能です(最大5時間/日まで)。
※2 学習プランの紹介も含みます。
※3 楕円・真円サーキットでの開発ハンズオンも含みます。
※4 講義での最新事例紹介のみで、開発体験はありません。
プラン詳細については、こちらの資料をご覧ください。

講師 山下洋樹
専門 自動運転システム設計とレーシングカーのデータ解析
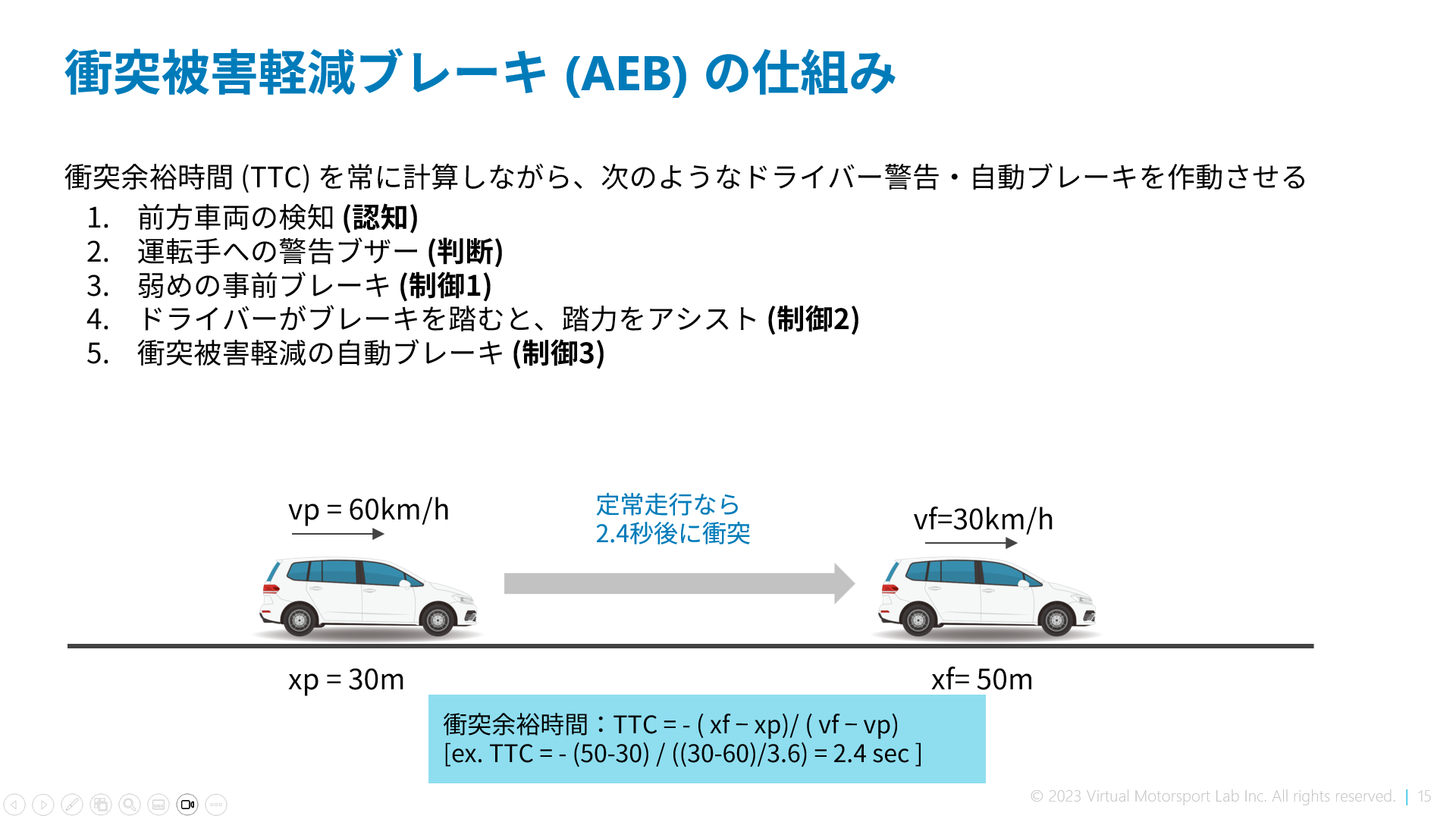
自動車メーカーの自動運転部門で、衝突被害軽減ブレーキ (AEB) や車間距離制御装置 (ACC) の開発に携わる。2019年に渡欧。ドイツF3チームを経て、Toyota Gazoo Racing Europe GmbHでは、データエンジニアとして世界ラリー選手権のタイトル獲得に貢献。
「未来のモビリティ産業に繋がる自動運転レースを創りたい」という想いから、2022年に起業。2023年度よりKSAC及び大阪産業局主催の「デジタルスキル実践チャレンジワークショップ」で講師を務める。筑波大学大学院システム情報工学研究科修了。
受講者の声
これまでの知識は見聞きしたり、書籍で読んだことがある程度でした。しかし、このセミナーを通じて、実際に体感し、実感できる学びが得られました。説明も非常にわかりやすく、受講して本当に満足しています。さらに深く学びたいと強く思いました。

会社役員
モデル予測制御や強化学習、LLMなどがどのように役に立つのかを学ぶことができました。Pythonを動かす際、スタッフの方が丁寧に教えてくださった点も良かったです。自動運転の車の開発の知識は全くなかったのですが、とても面白かったです。

大学院生
自動車業界に就職予定で、機械系を専攻していますが、AIやソフトウェアにも興味があり、このコースを受講しました。自動運転の開発体験は楽しく、これからのキャリアにも役立つと感じています。満足です!
大学生
コードを変更すると車両シミュレーションに反映されるため、開発が楽しかったです。自動運転の仕組みも全体像が分かり、満足でした。

ドローンエンジニア
画像系AI開発を仕事で行っていますが、強化学習の知見を得たく参加しました。講義の説明がとても分かりやすく、また実際に自分の手を動かしながら開発できるので楽しかったです。
AIエンジニア
プログラミングは経験がなく自信はありませんでしたが、プログラムを変えていくと実際にシミュレーションの結果が変わっていくのがとても楽しかったです。

高校生
これまでの知識は見聞きしたり、書籍で読んだことがある程度でした。しかし、このセミナーを通じて、実際に体感し、実感できる学びが得られました。説明も非常にわかりやすく、受講して本当に満足しています。さらに深く学びたいと強く思いました。
会社役員
モデル予測制御や強化学習、LLMなどがどのように役に立つのかを学ぶことができました。Pythonを動かす際、スタッフの方が丁寧に教えてくださった点も良かったです。自動運転の車の開発の知識は全くなかったのですが、とても面白かったです。
大学院生
自動車業界に就職予定で、機械系を専攻していますが、AIやソフトウェアにも興味があり、このコースを受講しました。自動運転の開発体験は楽しく、これからのキャリアにも役立つと感じています。満足です!
大学生
コードを変更すると車両シミュレーションに反映されるため、開発が楽しかったです。自動運転の仕組みも全体像が分かり、満足でした。
ドローンエンジニア
画像系AI開発を仕事で行っていますが、強化学習の知見を得たく参加しました。講義の説明がとても分かりやすく、また実際に自分の手を動かしながら開発できるので楽しかったです。
AIエンジニア
プログラミングは経験がなく自信はありませんでしたが、プログラムを変えていくと実際にシミュレーションの結果が変わっていくのがとても楽しかったです。
高校生
これまでの知識は見聞きしたり、書籍で読んだことがある程度でした。しかし、このセミナーを通じて、実際に体感し、実感できる学びが得られました。説明も非常にわかりやすく、受講して本当に満足しています。さらに深く学びたいと強く思いました。
会社役員
モデル予測制御や強化学習、LLMなどがどのように役に立つのかを学ぶことができました。Pythonを動かす際、スタッフの方が丁寧に教えてくださった点も良かったです。自動運転の車の開発の知識は全くなかったのですが、とても面白かったです。
大学院生
自動車業界に就職予定で、機械系を専攻していますが、AIやソフトウェアにも興味があり、このコースを受講しました。自動運転の開発体験は楽しく、これからのキャリアにも役立つと感じています。満足です!
大学生
コードを変更すると車両シミュレーションに反映されるため、開発が楽しかったです。自動運転の仕組みも全体像が分かり、満足でした。
ドローンエンジニア
画像系AI開発を仕事で行っていますが、強化学習の知見を得たく参加しました。講義の説明がとても分かりやすく、また実際に自分の手を動かしながら開発できるので楽しかったです。
AIエンジニア
プログラミングは経験がなく自信はありませんでしたが、プログラムを変えていくと実際にシミュレーションの結果が変わっていくのがとても楽しかったです。
高校生
学習ステップ
好きな日時に自宅のPC (またはキーボード付きタブレット) から開発体験ができます。
講義動画で自動運転システムの全体像を学ぶ
シミュレーターでの開発体験内容と、実際の自動運転システムの関連性を理解します。
シミュレーターで自動運転レーシングカーを走行させる
基本コードの編集から始め、わずかな変更で車両の挙動やラップタイムが変わることを確認します。
コードやアルゴリズムを開発する
動画解説とチュートリアル資料、シミュレーターから得られる走行データも参考に開発します。最速のレーシングカーを目指しましょう!
疑問点はDiscordで質問して解決する
質問や疑問点は、Discordのチャンネルで解決します。