

自動運転システム研修
年間研修プログラムとして、SUBARU様の技術者育成にご活用いただいています。受講者の声と成果は、インタビュー記事でご紹介しています。
仕様検討・実装・走行・評価のサイクルを繰り返し演習。実車OJTだけでは身につけにくい、車両開発の体系的な理解と実装力を育成します。
WHY VML TRAINING
VML研修では、制御理論やAI・ソフトウェア技術を、仕様・実装・走行・評価のサイクルの中で学びます。
車両挙動との結びつき、車両システム全体の理解、実務への接続力を、シミュレーターを用いたハンズオン形式で身につけます。
量産開発の現場に導入される制御開発ツールは、車両運動学や制御理論の背景を把握しなくても業務を推進できるように設計されています。一方で、トラブル対応や新技術導入では、ソフトウェアを車両挙動に結びつけて理解できないと対応できません。
VML研修では制御理論を学び、実装し、車両挙動として確かめることで、開発業務に応用できる基礎力を鍛えます。
分業化・複雑化が進む自動車開発では、担当領域が細分化され、車両アーキテクチャ全体を体感する機会は限られています。
VML研修では、一人一台のハンズオン環境で、センサー入力の設定から走行アルゴリズムの実装までを何度も繰り返すことで、SDV・自動運転時代に重要となる「全体システムを俯瞰する視点」を獲得します。
AIやソフトウェア技術を学んでも、自動車開発特有のプロセス、安全性、品質担保、評価の考え方に接続できなければ、実務での活用は難しくなります。
VML研修では、シミュレーターを活用することで、各技術の実装から車両の走行評価・改善までの自動車開発を模擬した環境下で、開発現場で活きる技術力を養います。
TRAINING COURSES
VMLの研修は目的別に大きく3つの標準コースをご用意しています。対象者の専門性やレベルに応じてコースの内容や組み合わせは調整できます。
自動運転システムのセンサ・ソフトウェアの全体像、安全性規格や評価方法から、モジュラー型自動運転・E2E自動運転までをハンズオン形式で実践的に学びます。
車両制御における制御理論の基礎からAI学習モデルでの制御介入や自動チューニングまで、AI/機械学習の制御応用をハンズオン形式で実践的に学びます。
LLM/生成AIを活用した車載AIエージェント開発の各社の導入事例から、自然言語入力による車両機能制御までハンズオン形式で実践的に学びます。
※ いずれのコースも、お客様の業務文脈や対象技術者層に応じてカスタマイズが可能です。
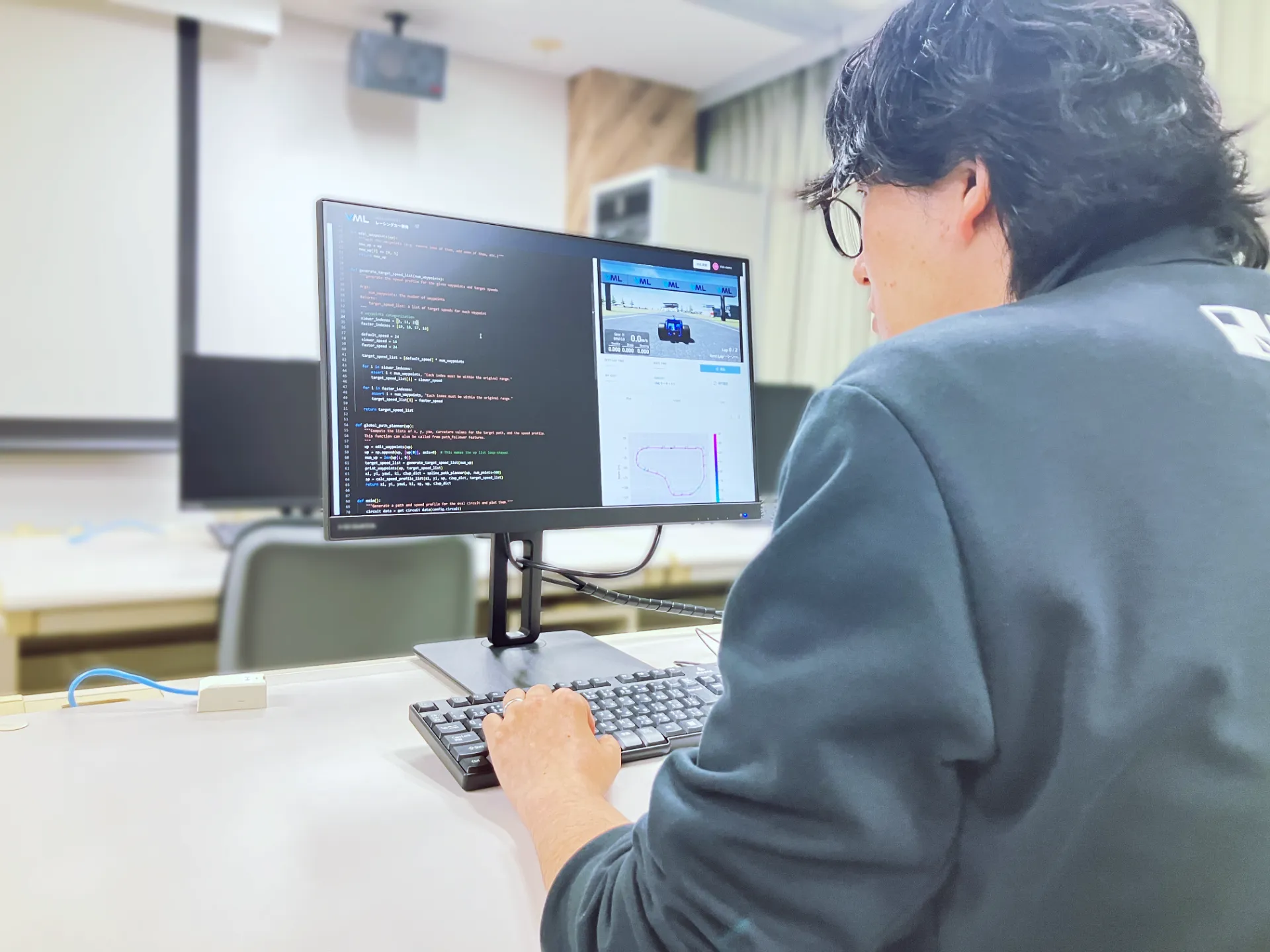
HOW VML TRAINING WORKS
VMLの自動運転・車両制御シミュレーターを活用し、仕様検討からソフトウェア実装、走行、データ解析・評価、改善までの開発サイクルを、受講者自身が繰り返し実践できる環境を提供します。
目標挙動や評価条件を整理し、実装する制御・走行ロジックの方針を決める。
仕様に基づき、制御ロジックや走行アルゴリズムをコードとして実装する。
実装したロジックをシミュレーター上で走行させ、車両挙動を確認する。
走行データや評価指標をもとに、目標との差分や課題を把握する。
解析結果を踏まえて仕様や実装を見直し、再度走行させる。
実際の開発に近い流れに沿って、受講者自身が開発サイクルを何度も繰り返すことで、自動運転・車両制御の開発プロセスとそこで使える技術を体得できます。
走行データをもとに、単に「速い・遅い」ではなく、仕様どおりに走れているか、車両挙動が安定しているか、設計と実装のどこにギャップがあるかを確認します。研修で得た評価視点を、そのまま開発業務に持ち帰れる設計です。
01 / 仕様達成度
仕様に対して、実装結果がどこまで達成できているかを確認します。
02 / 車両挙動の安定性
制御が車両挙動として安定して成立しているかを評価します。
03 / 設計と実走行のギャップ
設計意図と実際の挙動を比較し、改善すべきポイントを特定します。
お客様の事業領域や研修テーマに応じて、評価指標をカスタマイズすることも可能です。
PARTICIPANTS' VOICE
研修を受講された技術者の方々からのコメントをご紹介します。
CUSTOMER & PARTNERS
日本を代表する自動車OEM、Tier1サプライヤー、自動車業界周辺のソフトウェア企業に、研修・カスタマイズをご提供しています。
自動車OEM
完成車メーカー
サプライヤー
自動車部品・システム
モビリティ関連企業
IT・ソフトウェア
年間研修プログラムとして、SUBARU様の技術者育成にご活用いただいています。受講者の声と成果は、インタビュー記事でご紹介しています。
SDV SKILL MAP
2030年に約5.1万人のソフトウェア人材不足が見込まれる中、自動車技術会と経済産業省は2025年3月に SDVスキル標準を策定しました。この技術マップを踏まえ、VMLの各研修コースが、どの領域をカバーしているかを示します。
| エンジニアリング共通 | ソフトウェア共通 | 自動車共通 | 機能・サービス固有 | |
|---|---|---|---|---|
| 基礎技術 | 制御理論PID/Pure Pursuit/LQR/MPC信号処理・フィルタ/最適化理論/ML・DL基礎 | アルゴリズム・データ構造探索/経路計画 | 車両運動学運動モデル/ステアリング角導出 | ― |
| 要素技術 | センサ技術/計測技術カメラ/レーダー/ライダー/GNSS/IMU | 機械学習/深層学習・DRLLLM/Transformer異常検知AI | 自動運転パイプライン認知→判断→制御パワートレイン・シャシー制御 | 走行計画・障害物回避/E2E・VLM・VLA/生成AI×自動運転車載AIエージェントLLM/Function Calling/自然言語入力→車両機能制御 |
| 開発・運用技術 | シミュレーション技術VMLシミュレーター/走行テスト | ソフトウェアコード作成PythonAIモデル学習・評価 | 走行データ解析/開発サイクル/AIモデルの車載応用 | ― |
| 法令・規格 | ― | ― | 安全規格ISO 26262/SOTIF/ISO 21434/SAE J3016 | ― |
※出典:経済産業省「モビリティDX戦略 2025」、自動車技術会「SDVスキル標準解説書」(2025年3月)
TRAINER PROFILE
自動車メーカーの自動運転開発部門にて、先進運転支援システムの開発に従事。車両制御・システム評価を軸に、量産開発における設計・実装・検証プロセスを経験。その後、欧州モータースポーツの現場で、車両制御・走行データ解析に携わる。ドイツF3チームでのEuroFormula Open、Toyota Gazoo Racing Europe GmbHでの世界ラリー選手権(WRC)におけるタイトル獲得に貢献。
欧州在住中の2022年にVirtual Motorsport Lab Inc.(VML)を創業。自社開発のシミュレーターを活用し、自動車・モビリティ業界向けの技術者育成と技術検証を支援している。
CUSTOMIZATION
標準コースは、お客様の組織や受講者層に合わせて、開催形式・コンテンツ・演習環境を柔軟にカスタマイズできます。
開催日数・1日あたりの時間枠・週次/集中型ペースなど、お客様の業務スケジュールに合わせて柔軟に調整できます。
お客様の業務文脈や対象技術者層に応じて、題材・難易度・取り上げる技術領域(制御理論/AI/センサー等)の重み付けを変更できます。
シミュレーター上で扱う車両モデル・走行シナリオ・センサー構成などを、お客様の業務領域や検証したい技術に近い形へ寄せられます。
新人研修・中堅向けリスキリング・部門単位のチーム研修など、対象者の経験レベルや人数規模に合わせて設計できます。
PROCESS
FAQ
標準コースは、自動運転・車両制御・AIの体系的なカリキュラムをそのままご提供する形です。お客様向けカスタマイズは、これら標準コースをベースに、開催日数・時間・学習テーマ・演習環境(車両モデルやシナリオ)などをお客様の業務文脈に合わせて調整した研修設計を指します。年間契約での継続実施や、社内コンペ形式での実施も可能です。
標準コースの代表的なカリキュラム例については、カリキュラム詳細ページでご紹介しています。各コースのトピック構成、講師資料の例、年間研修プランなどをご覧いただけます。お客様の業務文脈に合わせたカスタマイズも可能ですので、お気軽にご相談ください。
eラーニングは標準コースに付加できるオプションです。復習教材や、受講後の自己学習・自己研鑽用のコンテンツとしてご活用いただけます。受講者の方が、研修で学んだ内容を自分のペースで振り返ったり、関連トピックを深掘りされる際の支援教材として位置付けています。
コースによって異なります。車両物理を制御プログラムに落とし込むため、プログラミング・数学・物理の基礎知識があると理解が深ります。
ただし、開発経験や前提知識がなく、はじめて自動運転を学ぶ方に向けた「入門コース」から徐々にステップアップも可能です。お気軽にお問合せください。
お客様の会議室での出張開催、またはVMLが提携するPCルームでの開催の両方に対応しています。お客様のご都合・人数規模に合わせて、最適な開催形態をご提案します。オンライン開催も応相談です。
環境構築は不要です。VMLのシミュレーターはWebブラウザ上で動作する設計のため、業務用の標準的なPC(特別なハイスペック構成は不要)でそのまま受講いただけます。インストール作業や事前セットアップに時間を取られず、研修当日からすぐに実装演習に集中できます。
1回の研修あたり10〜20名程度を推奨しており、最大で50名規模まで対応可能です。VMLの研修はハンズオン形式(シミュレーター上での実装演習)が中心となるため、講師に加えてサポートスタッフが個別の開発体験を伴走支援します。参加者一人ひとりが詰まりなく「実装→走行→データ解析→改善」のサイクルを進められるよう、手厚いサポート体制を整えているのがVML研修の特徴です。
大手OEM・Tier1サプライヤー様との取引実績があり、秘密保持契約(NDA)・個別契約書での対応が可能です。お客様の社内規定に応じた契約形態をご相談いただけます。法務面の確認は弁護士と連携しながら対応いたします。
研修内容・規模・カスタマイズの度合いにより異なるため、個別お見積もりでご提案いたします。お問い合わせフォームよりご相談ください。
CONTACT
研修内容のご相談、お見積もり、シミュレーターのデモご希望など、お気軽にお問い合わせください。
お客様の課題に合わせて、最適な研修設計をご提案します。