COURSE01-A
自動運転開発実践コース
システム・制御編
- コース概要
モジュラー型自動運転システムのセンサからソフトウェア構成、自己位置推定や車両運動モデルまでを体系的に学習し、開発体験と合わせて理解を深める
- 受講対象者
- 新入社員の基礎学習 / 中堅・ベテラン技術者のリスキリング
- 前提知識
- プログラミング (言語不問)・物理・数学の基礎知識
- 所要時間
- 3日間 (昼食休憩1時間を含む)
学習内容
1日目
制御の基礎を体系化し、実装まで一貫して学ぶ
- 自動運転システムの全体像と構成要素
- 目標経路設計アルゴリズム
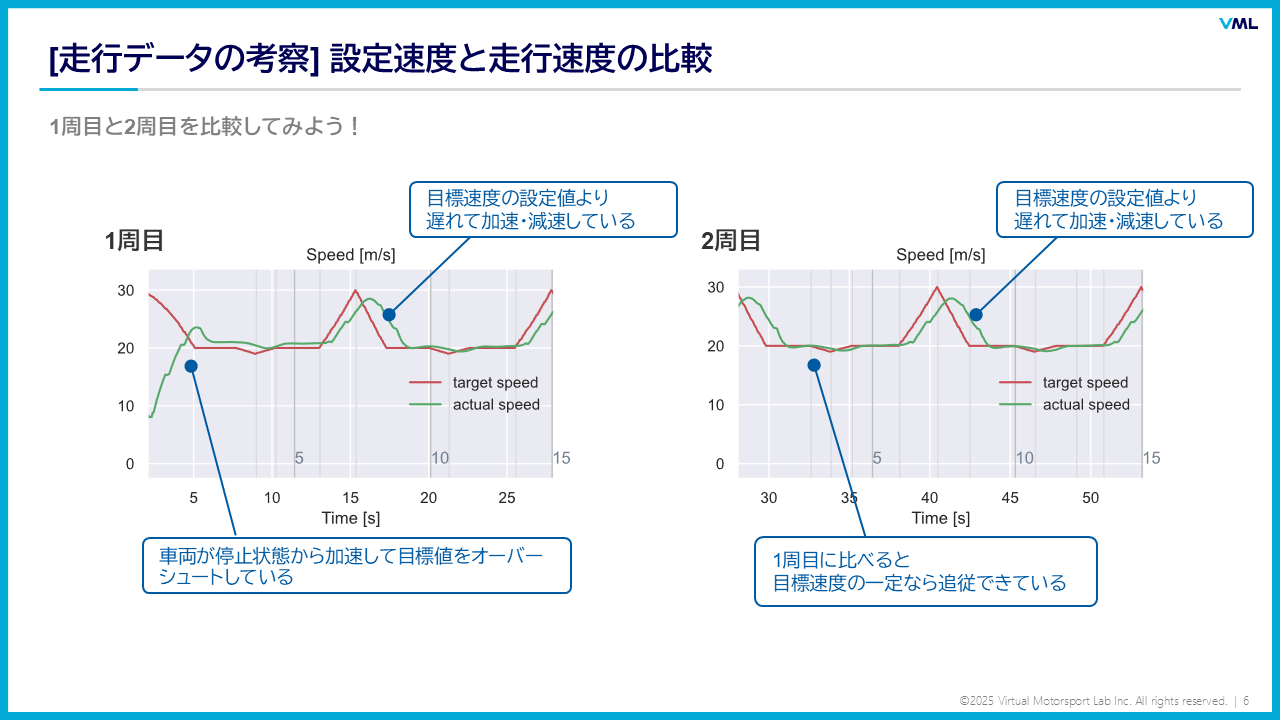
- 加速・減速制御 (PID制御)
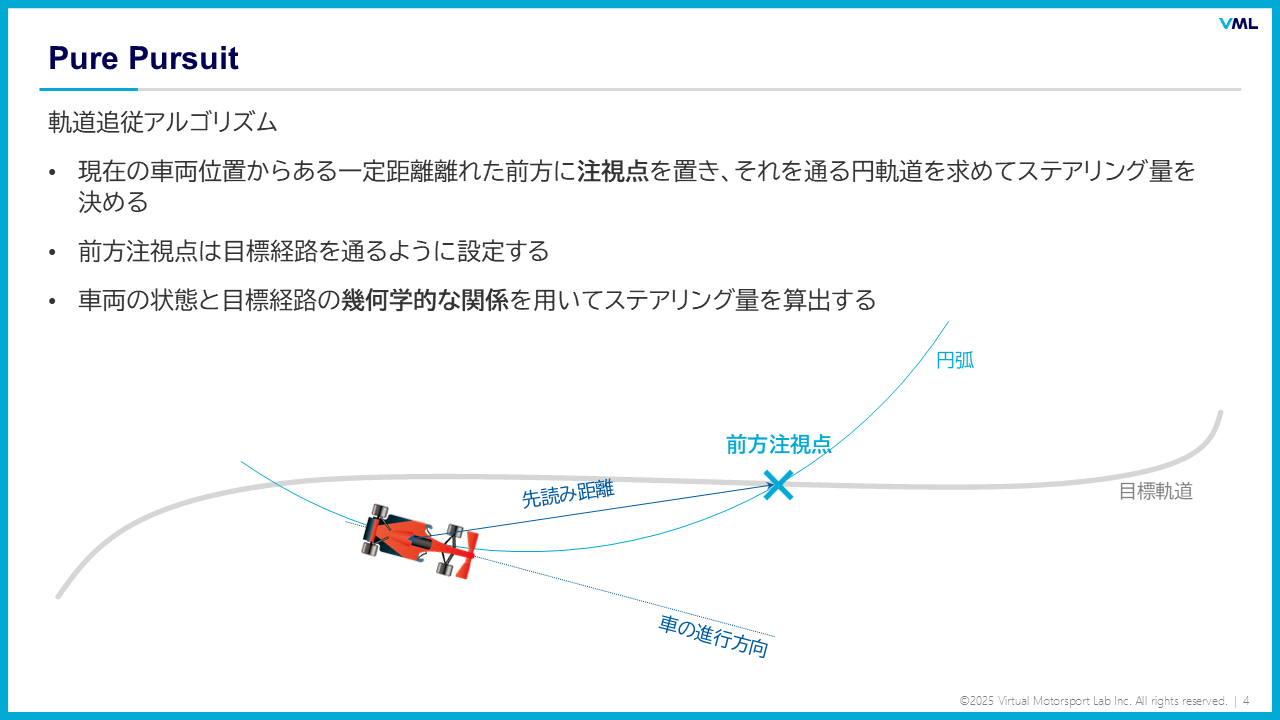
- 操舵制御 (Pure Pursuit)
- 総合演習 第1回 (開発実践と意見交換会)

2日目
現代制御と自己位置推定で、車両の認識と判断を結ぶ
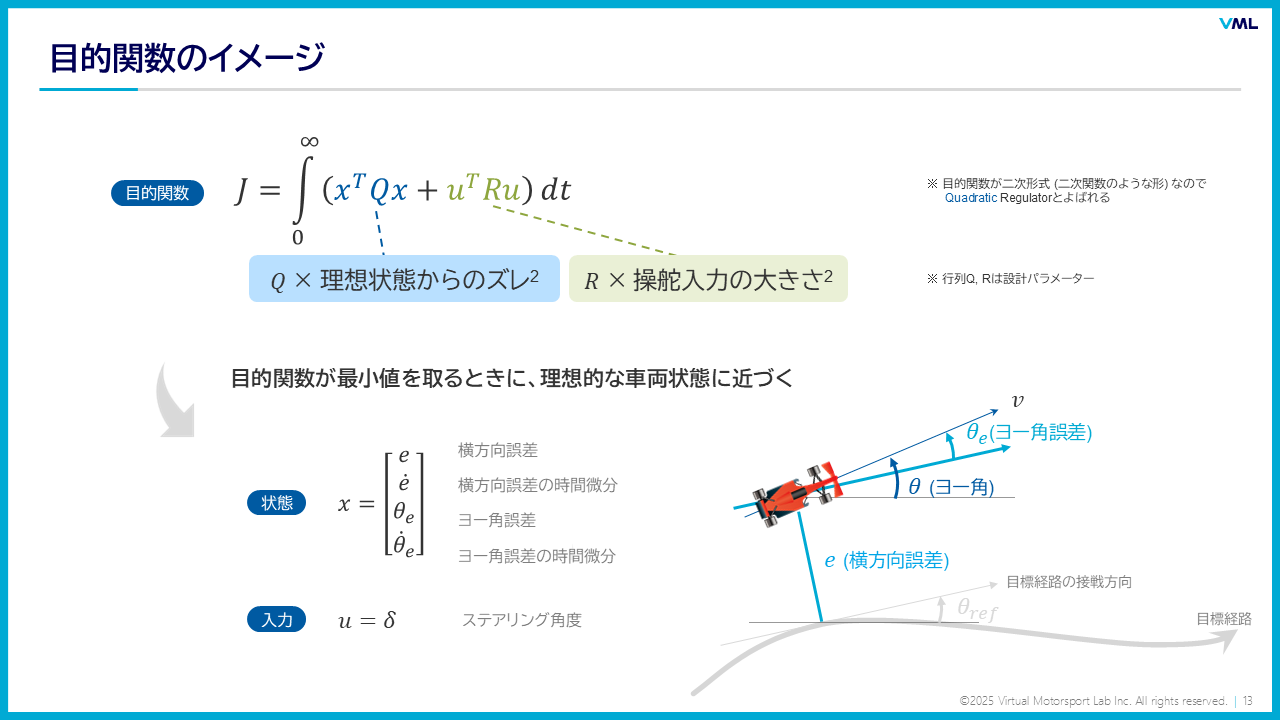
- 操舵制御 — LQR制御
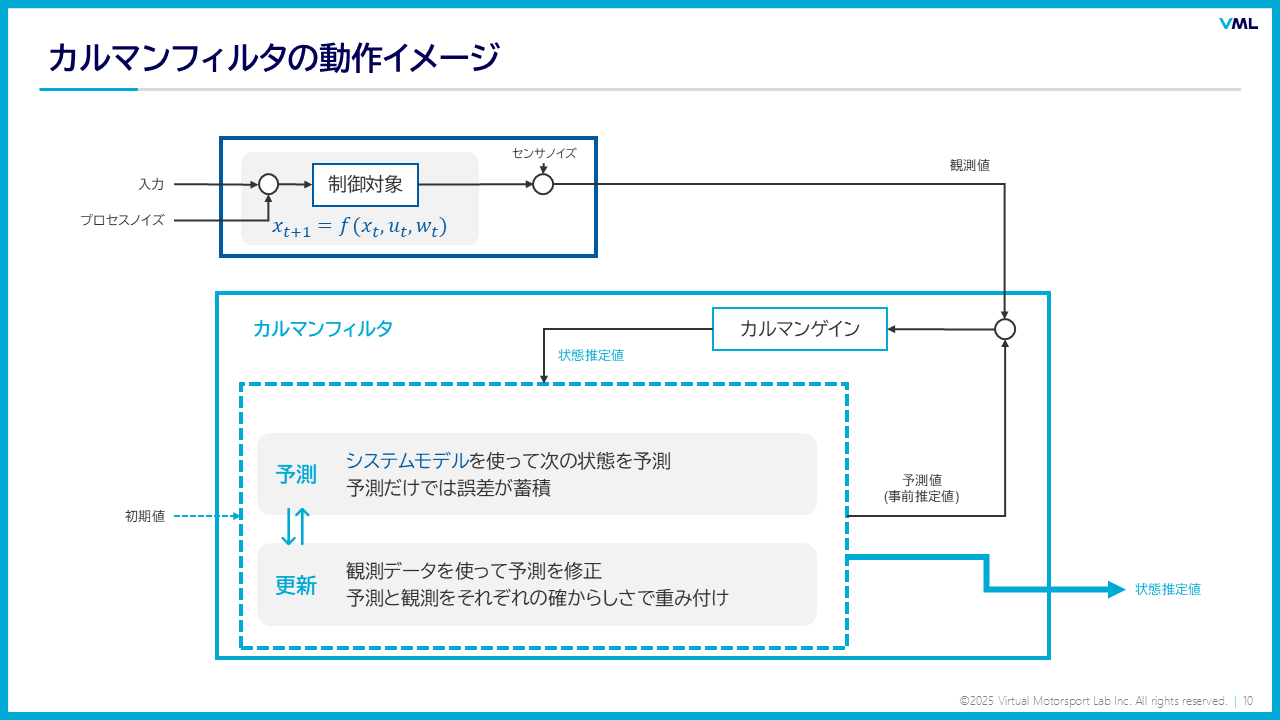
- 自己位置推定の手法
- GNSS / IMU の利点と欠点
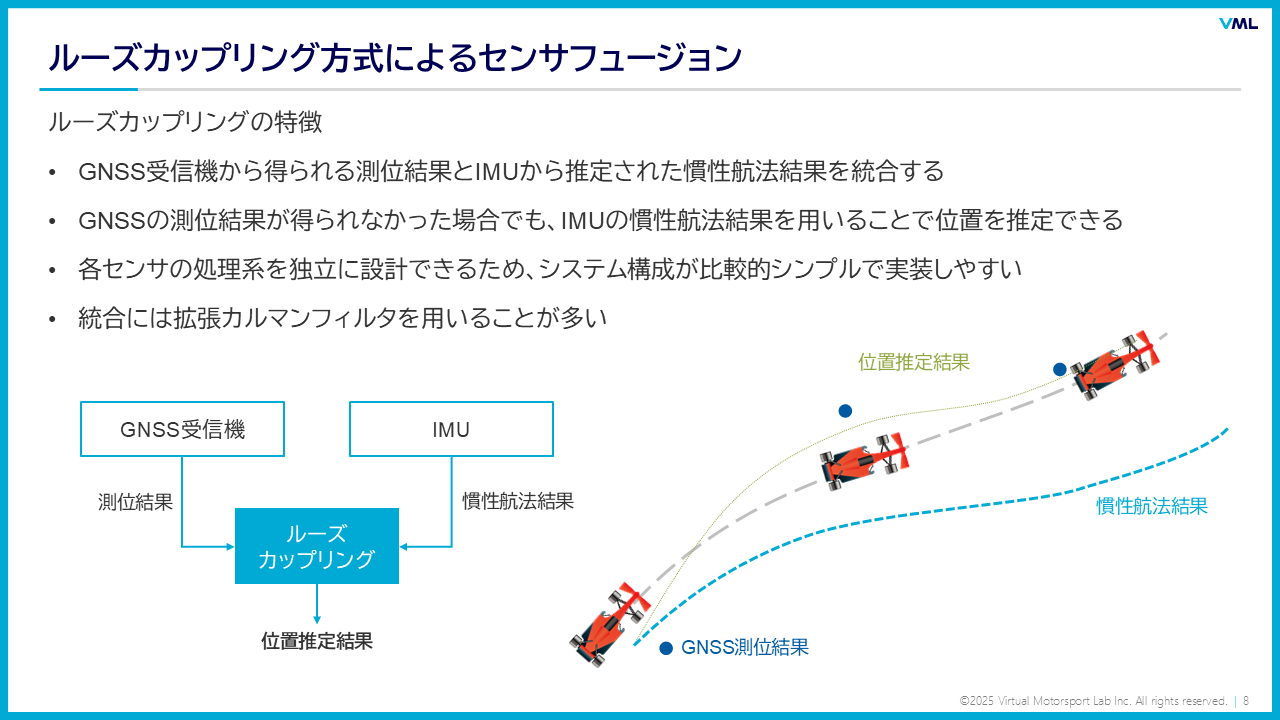
- 自己位置推定 (ルーズカップリング)
- 総合演習 第2回 (開発実践と意見交換会)
3日目
予測と最適化を活かして複雑な走行課題に対応する
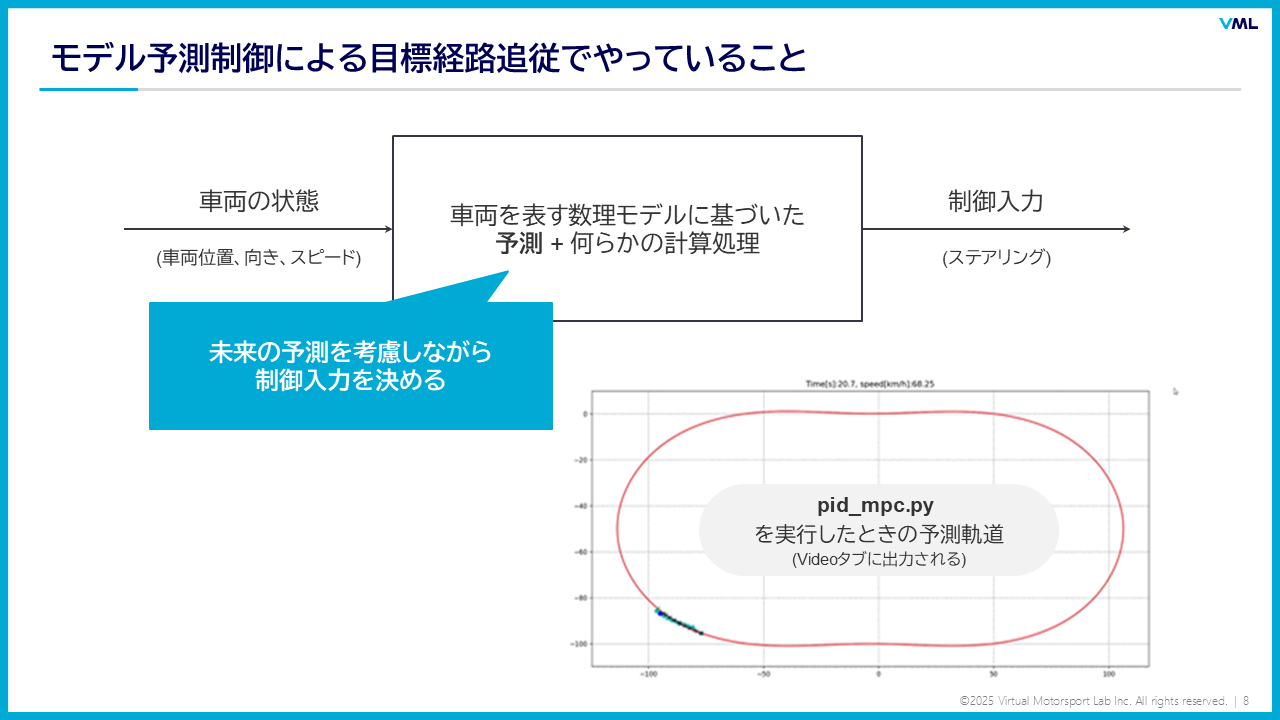
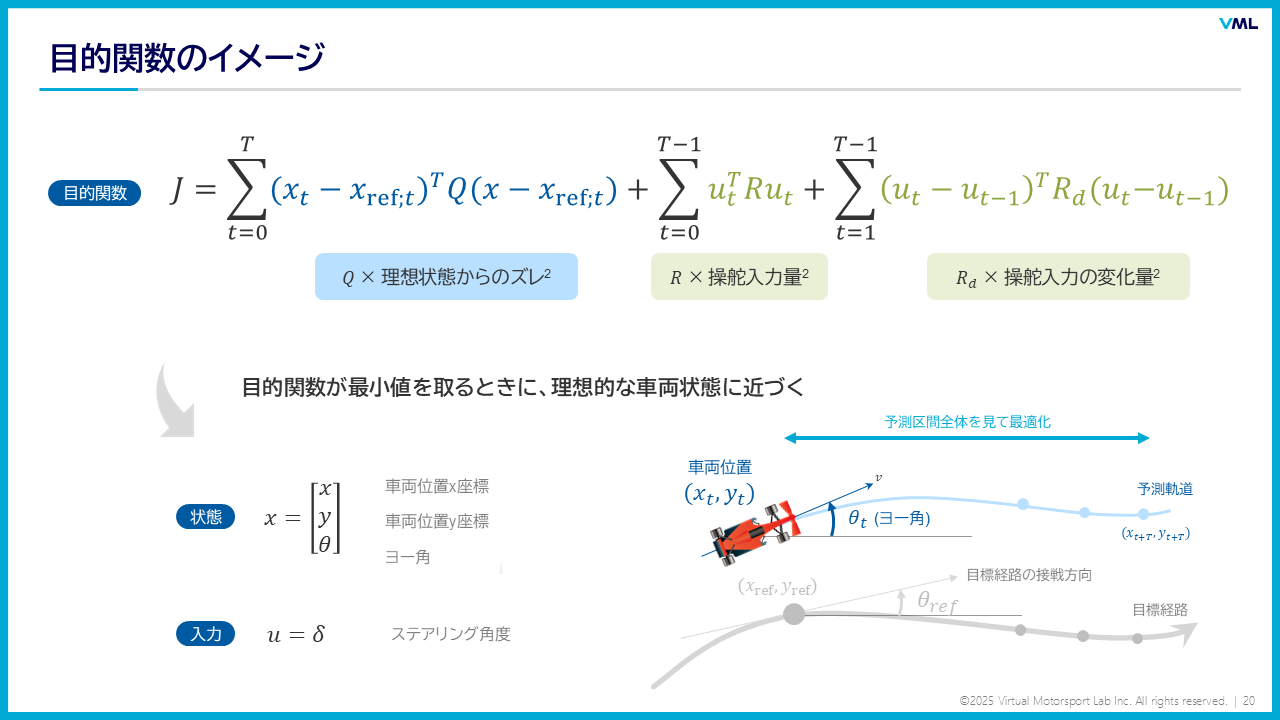
- モデル予測制御 (MPC)
- 最適化問題
- 各センサの特徴とセンサーフュージョン
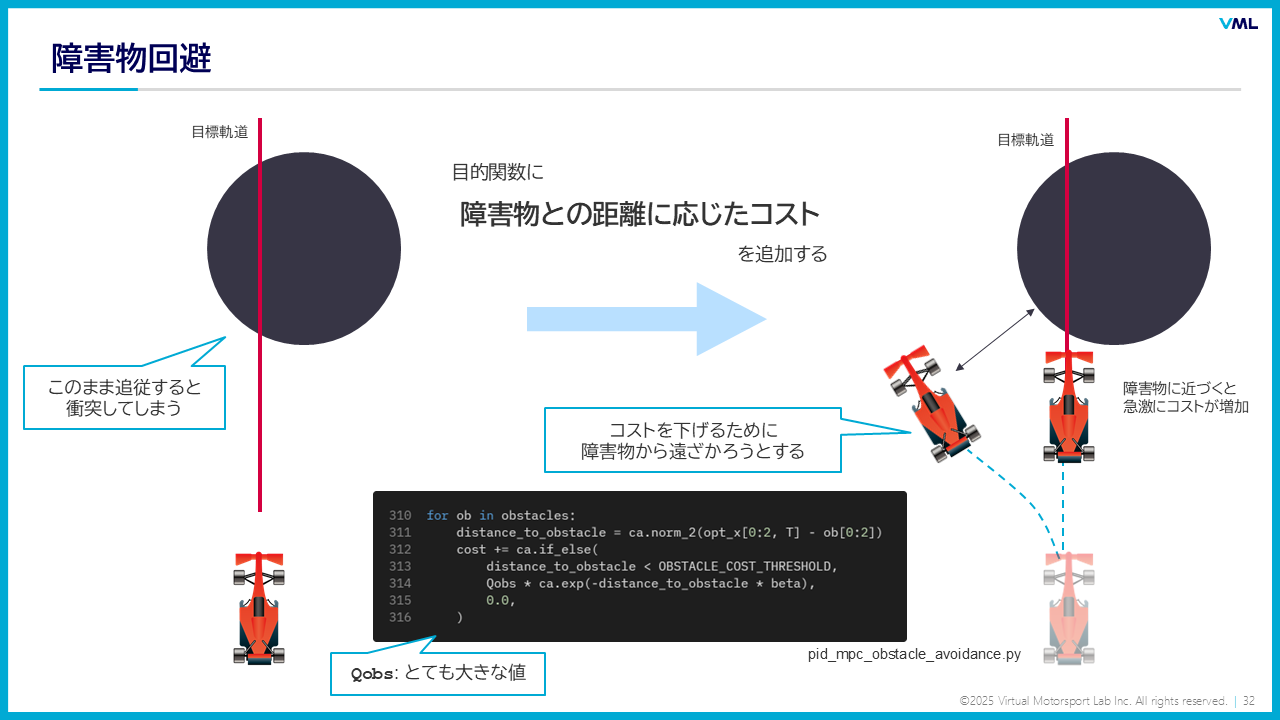
- 障害物回避制御
- 総合演習 第3回 (開発実践と意見交換会)
CUSTOMIZATION
学習テーマ・参加者レベル・ご要望に合わせて
カスタマイズできます
カリキュラムの内容はもちろん、開催形式・期間も柔軟にご調整いただけます。
まずはお気軽にご相談ください。