COURSE02
車両制御開発実践コース
AI/機械学習編
- コース概要
- 古典・現代制御理論の基礎から、車両制御における機械学習モデルの組み込みまでを体系的に学ぶ
- 制御適合値の自己学習アルゴリズムの組み込みと評価まで実践する
- 受講対象者
- 新入社員の基礎学習 / 中堅・ベテラン技術者のリスキリング
- 前提知識
- プログラミング (言語不問)・物理・数学の基礎知識
- 所要時間
- 3日間 (昼食休憩1時間を含む)
学習内容
1日目
古典・現代制御の理論を運動学モデルから接続して理解する
- イントロダクション
- 車両の運動学モデル
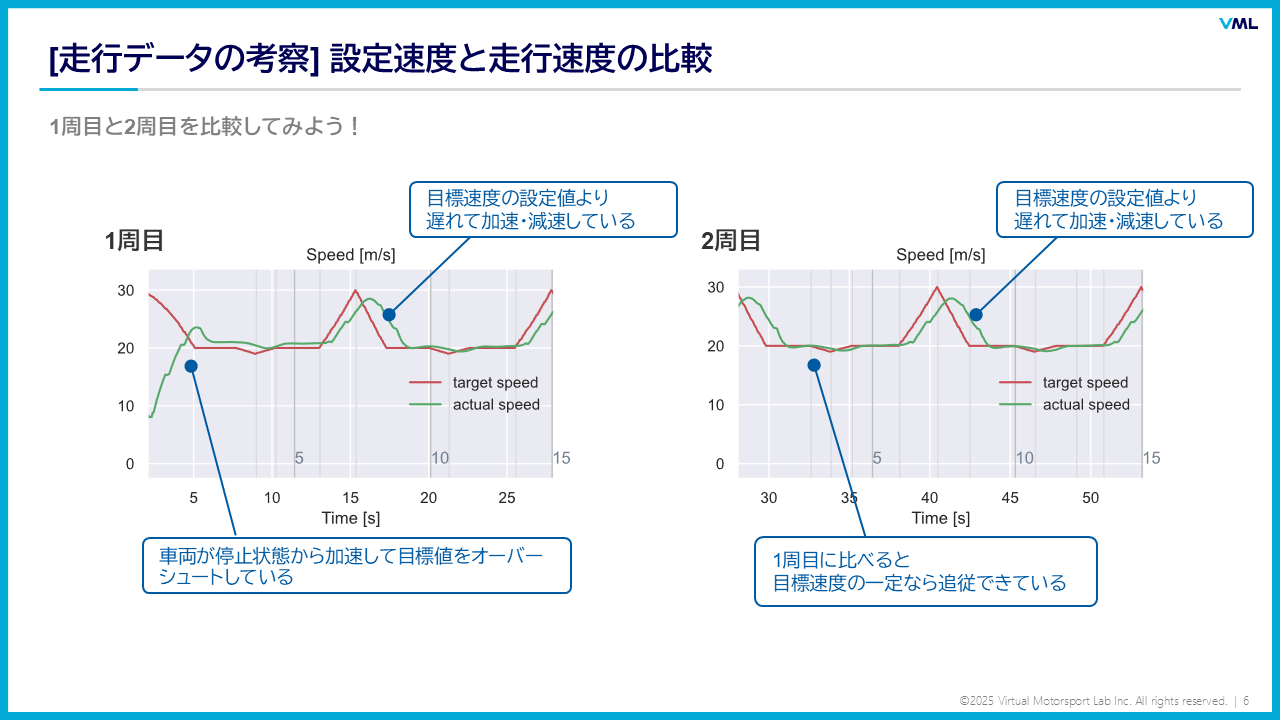
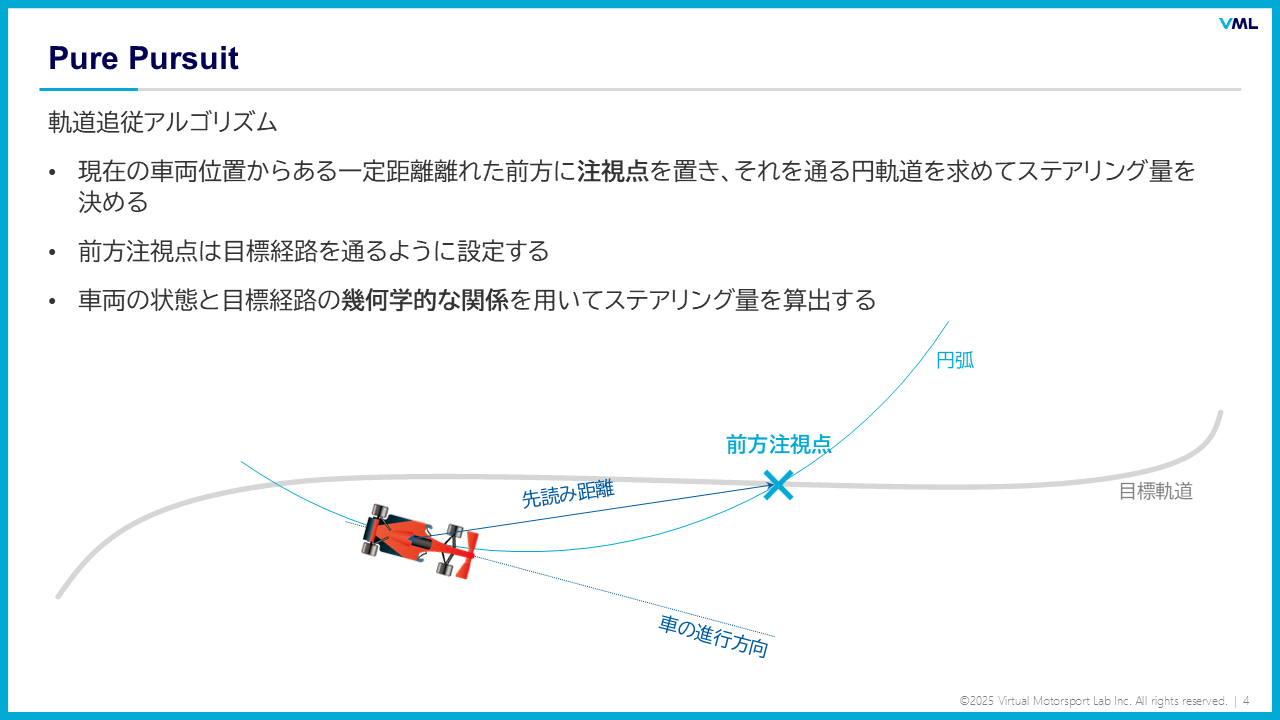
- 古典制御・幾何学制御の基礎 (PID・Pure Pursuit)
- 現代制御 (LQR制御)
- 総合演習 第1回 (開発実践と意見交換会)

2日目
AI モデルの構築と評価を、教師あり/なし学習の両面から実践する
- 機械学習・深層学習の基礎
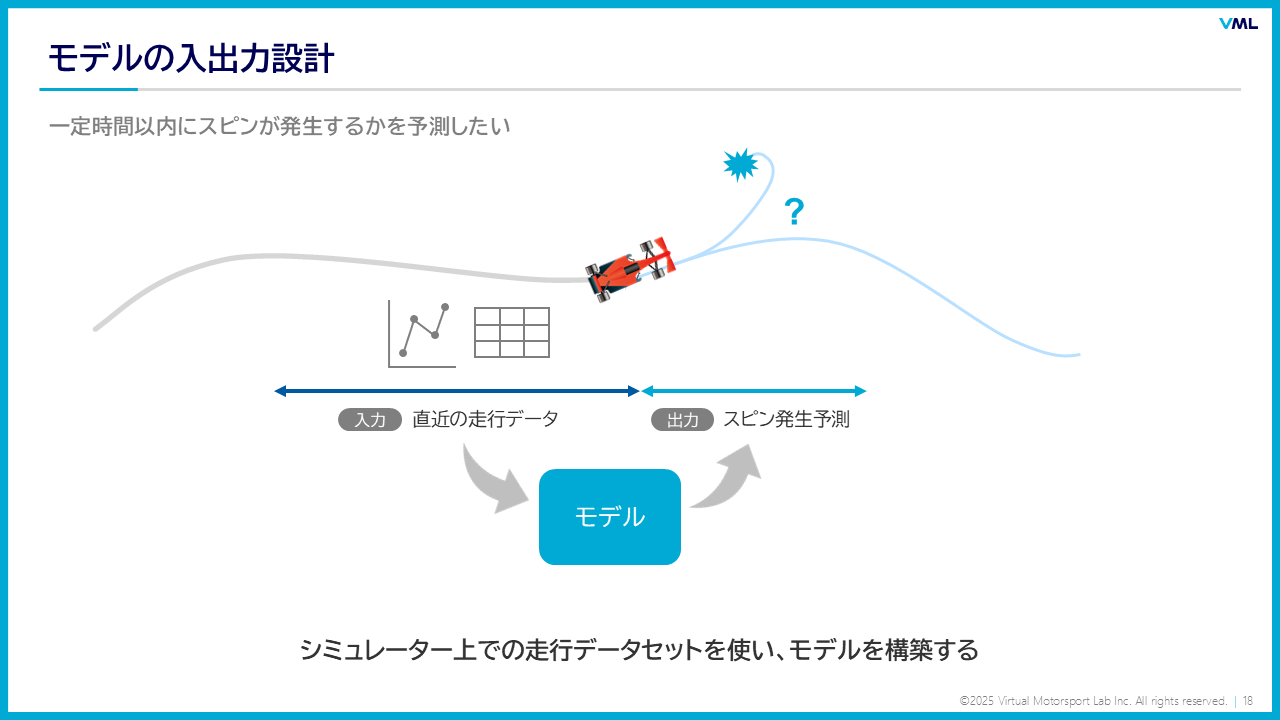
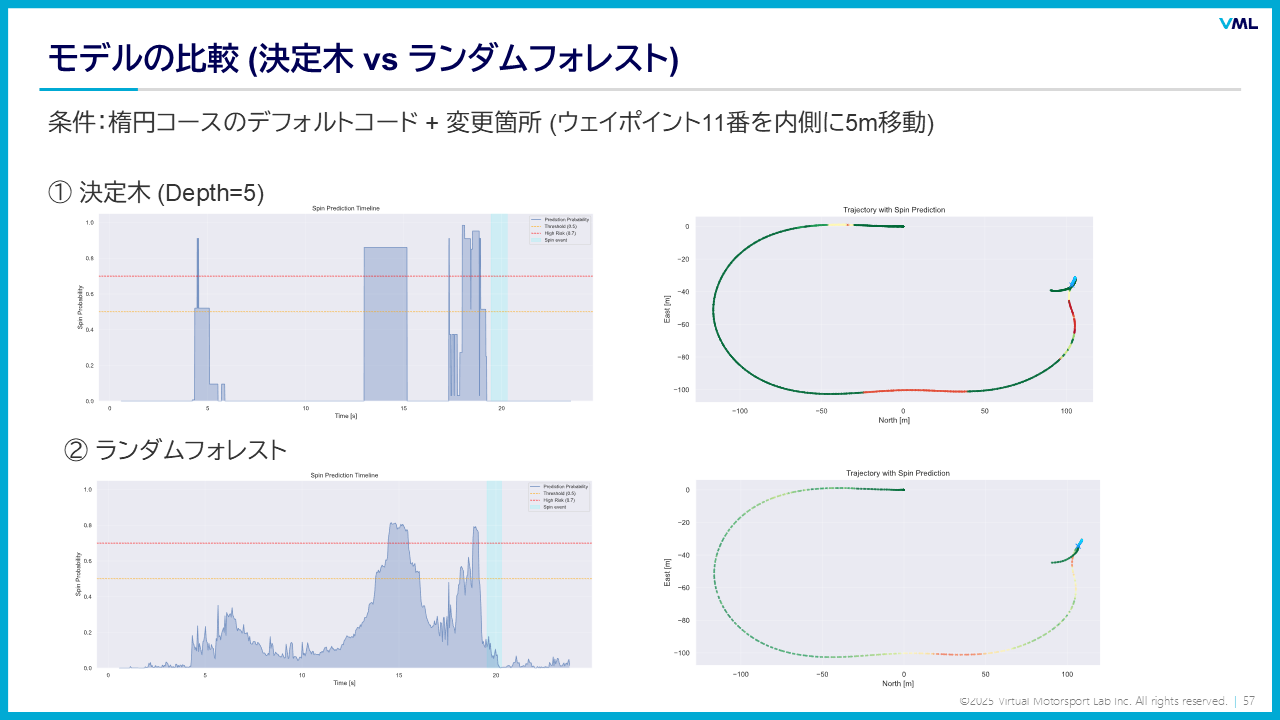
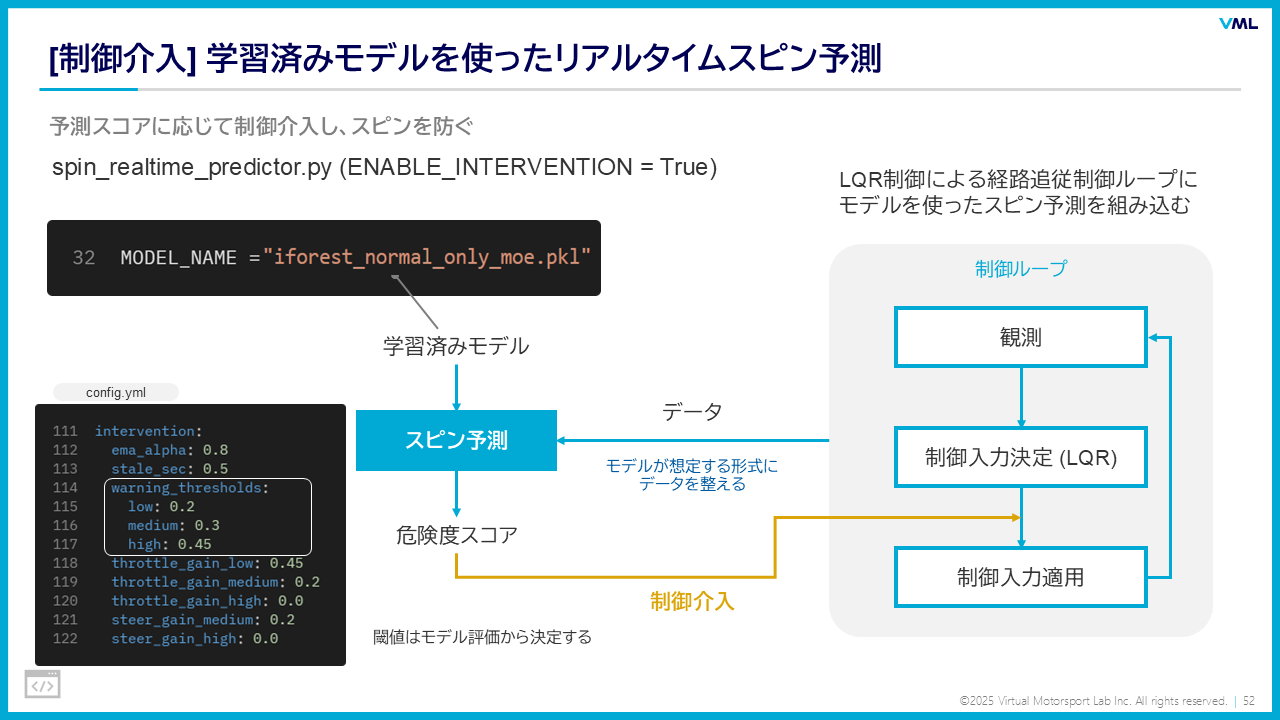
- スピン予測AIモデルの構築
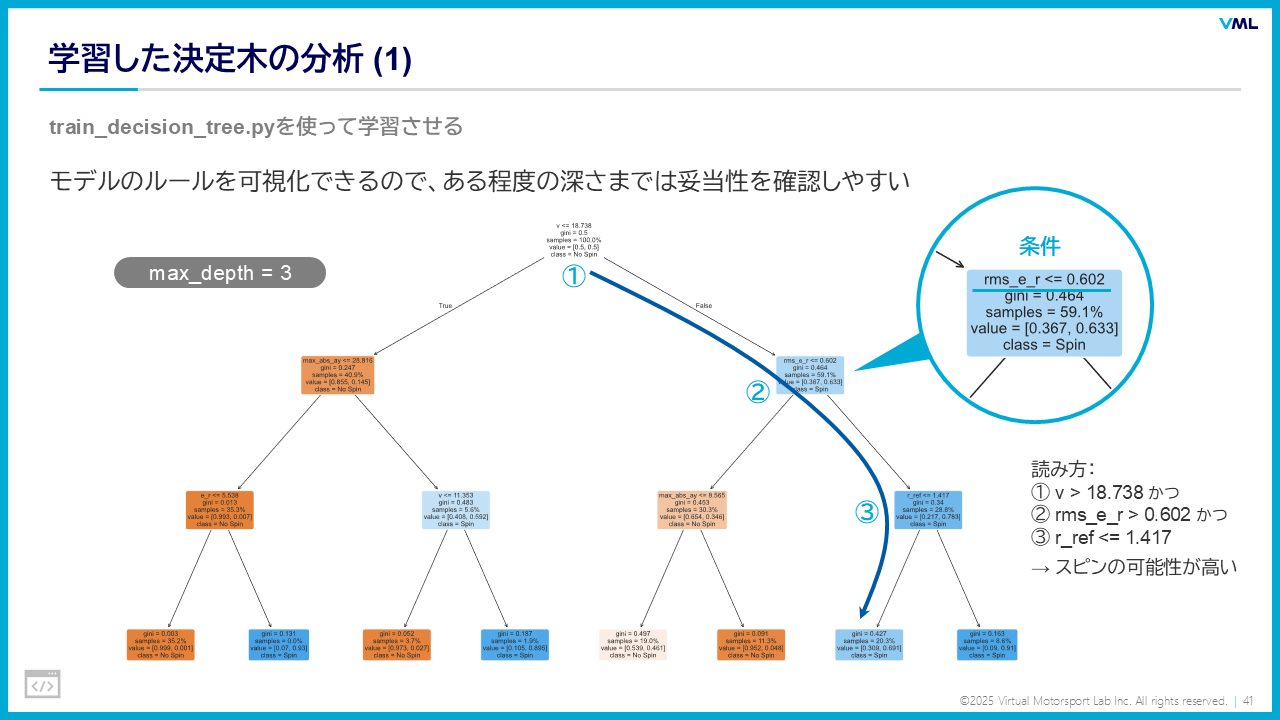
- 開発体験① 教師あり学習
- 開発体験② 教師なし学習
- 総合演習 第2回 (開発実践と意見交換会)
3日目
MPC と機械学習の融合で、適合値を自己調整する仕組みを学ぶ
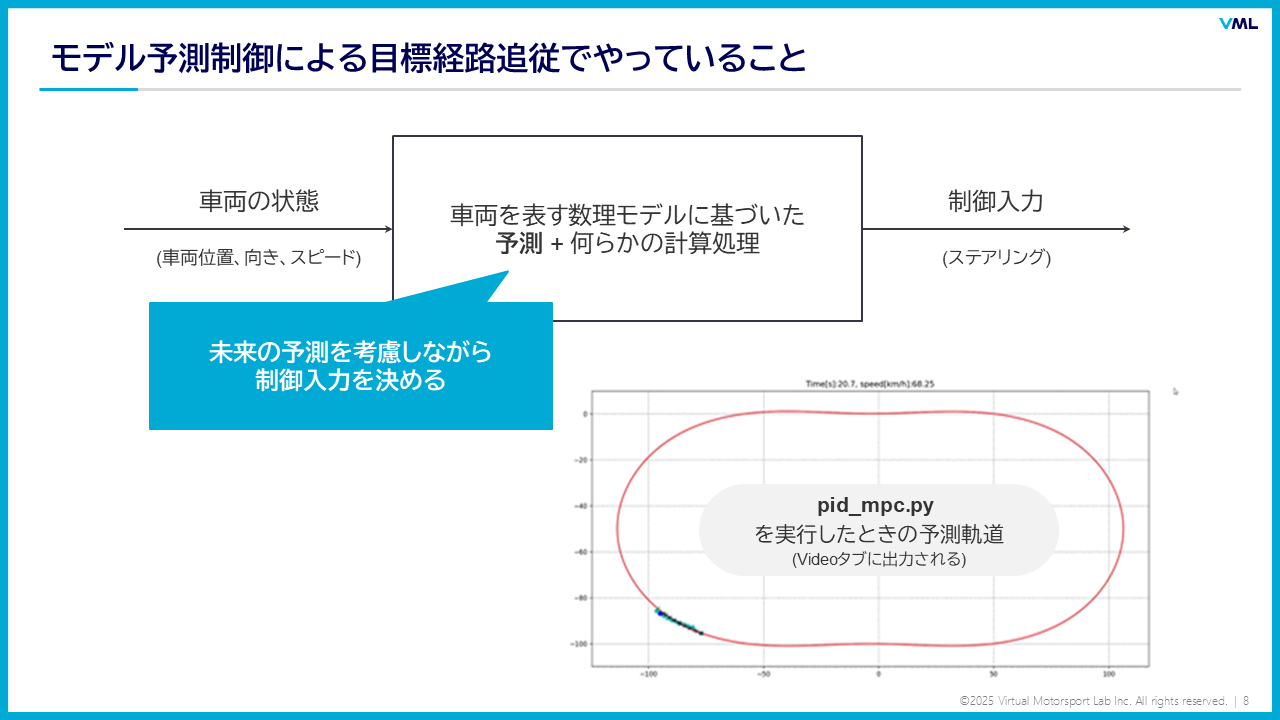
- モデル予測制御 (MPC)
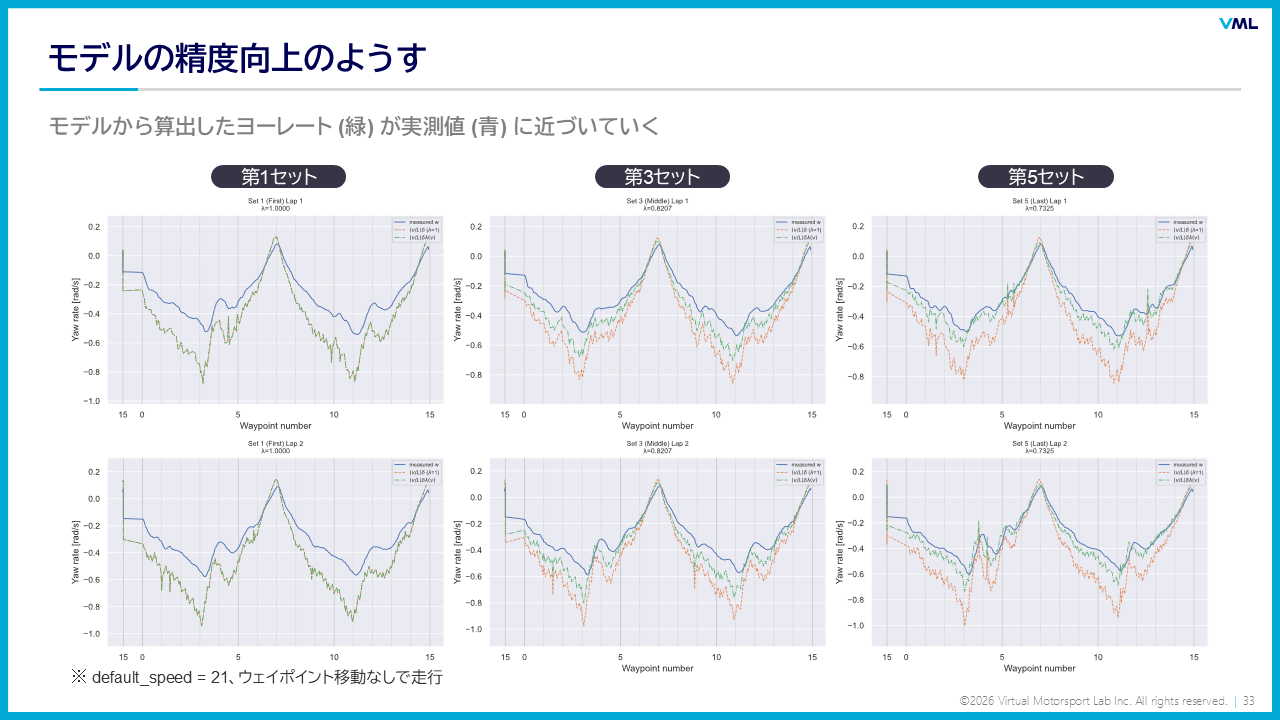
- 学習ベース MPC
- AI・機械学習による自動キャリブレーション
- 学習値の評価と車両走行への反映
- 総合演習 第3回 (開発実践と意見交換会)
CUSTOMIZATION
学習テーマ・参加者レベル・ご要望に合わせて
カスタマイズできます
カリキュラムの内容はもちろん、開催形式・期間も柔軟にご調整いただけます。
まずはお気軽にご相談ください。